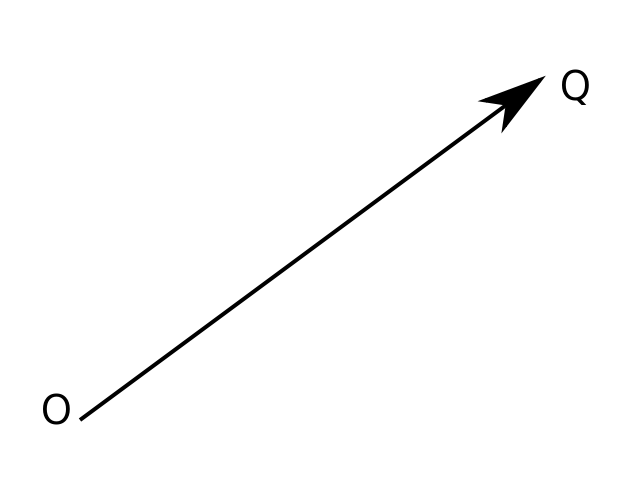
In this tutorial we will examine some of the elementary ideas concerning vectors. The reason for this introduction to vectors is that many concepts in science, for example, displacement, velocity, acceleration, force have a size or magnitude, but also they have associated with them the idea of a direction. And it is obviously more convenient to denote both quantities by just one symbol. That is the vector.
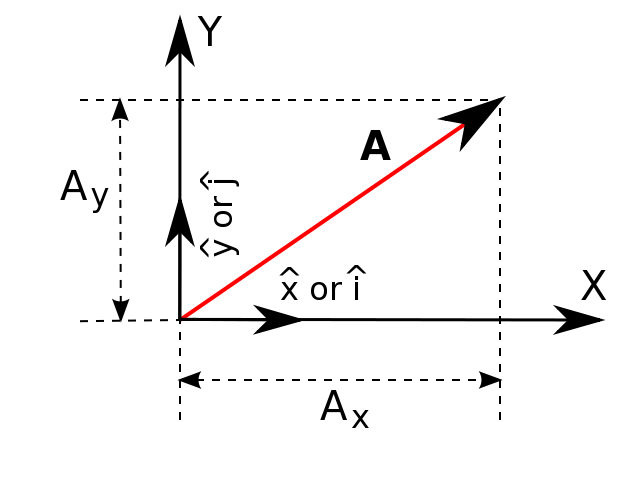
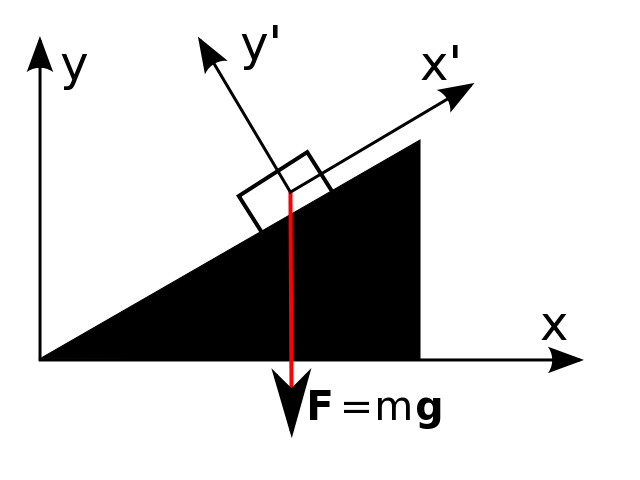
We want you to keep in mind, that vectors are measurable physical quantaties. As such they do not depend on us — observers. In particular, they do not depend on our choice of the coordinate system. However, the way we represent a vector in any given system of coordinates does depend on the coordinate system.